ZUT rozwija futurystyczny projekt dla Cargotec
Zespół naukowców Wydziału Inżynierii Mechanicznej i Mechatroniki konstruuje interaktywne urządzenia do zdalnego sterowania żurawiem przeładunkowym – technologiczną przyszłość dla fińskiej firmy.
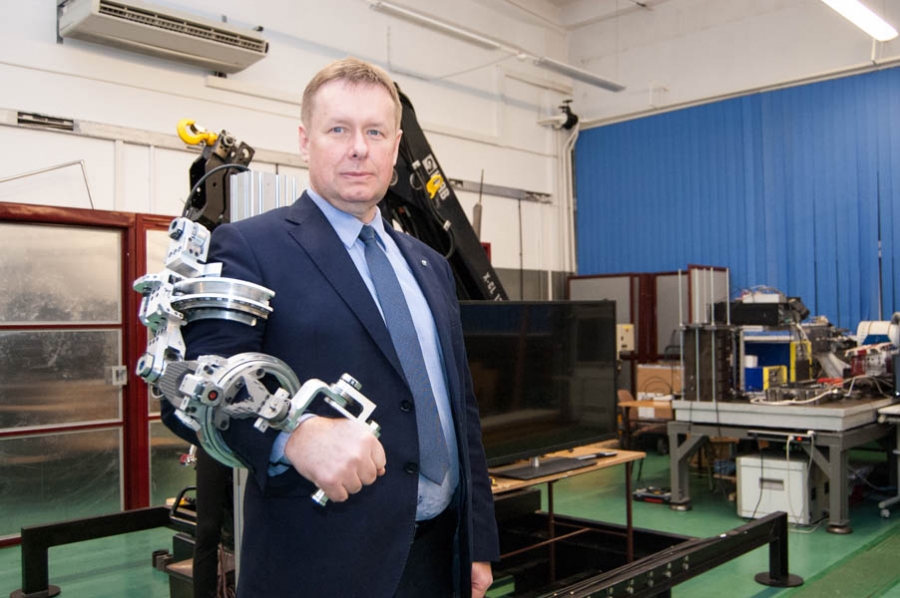 Wyposażone w sensory ramię robotyczne to jedno z innowacyjnych rozwiązań sterowania dźwigiem leśnym. Nad postępami prac przy projekcie czuwa prof. Mirosław Pajor, dziekan Wydziału Inżynierii Mechanicznej i Mechatroniki ZUT
/fot.: ak /
Wyposażone w sensory ramię robotyczne to jedno z innowacyjnych rozwiązań sterowania dźwigiem leśnym. Nad postępami prac przy projekcie czuwa prof. Mirosław Pajor, dziekan Wydziału Inżynierii Mechanicznej i Mechatroniki ZUT
/fot.: ak /
Cargotec – fiński producent maszyn, dźwigów i podnośników, który od 2014 roku ma zakład montażowy w Stargardzie, kilka lat temu postanowił znaleźć rozwiązanie, które zwiększy funkcjonalność urządzeń przeładunkowych. Firma zainteresowała się projektami z zakresu sterowania, które powstały w Centrum Mechatroniki działającym przy Wydziale Inżynierii Mechanicznej i Mechatroniki Zachodniopomorskiego Uniwersytetu Technologicznego (WIMiM ZUT).
– Firma Cargotec chciała, by dźwig działał trochę tak, jak robot. Założyliśmy, że podstawą do stworzenia nowych rozwiązań jest wymiana wiedzy. Najpierw na Wydziale Elektrycznym ZUT (WE ZUT) zrealizowaliśmy projekt iLoad nastawiony na wymianę kadr oraz uczenie się, co i jak firma produkuje. W ramach tego projektu pracowano nad nowym systemem sterowania żurawiem samochodowym. Pracownicy WE ZUT brali również czynny udział w projektowaniu gogli 3D, które umożliwiły wirtualne sterowanie dźwigiem leśnym bez wysiadania z kabiny ciężarówki. Rozwiązanie zostało wdrożone przez firmę Cargotec na początku ubiegłego roku – wspomina prof. Mirosław Pajor, dziekan Wydziału Inżynierii Mechanicznej i Mechatroniki ZUT.
Po nim wzrósł apetyt firmy i naukowców z Centrum Mechatroniki na interaktywne techniki sterowania maszynami. Od dwóch lat WIMiM ZUT pracuje nad kolejnymi usprawnieniami pracy dźwigów leśnych. Projekt realizowany jest w ramach Programu Badań Stosowanych finansowanego ze środków Narodowego Centrum Badań i Rozwoju kwotą w wysokości blisko 3,2 mln zł. Zaangażowane są w niego dwie inne uczelnie – Politechnika Poznańska i Politechnika Koszalińska.
– Projekt ten nie wymaga wdrożenia, jest to projekt badawczy, który ma pokazać, że dana technologia ma zastosowanie do sterowania dźwigiem. Chodzi o to, by wykonać wdrożenie wyników badań naukowych w warunkach półprzemysłowych – informuje prof. Mirosław Pajor. Potrzebne do symulacji dźwigi dostarczyła na ZUT firma Cargotec.

Innowacyjne rozwiązania już są
Projekt dotyczy systemów sterowania do dźwigów leśnych oraz samochodowych tzw. HDS, czyli przenośnych dźwigów do drewna. Jak wyjaśnia prof. Mirosław Pajor, operowanie takim dźwigiem to złożone zadanie wymagające złożenia wielu ruchów i dużej wprawy operatora, który steruje jednocześnie kilkoma napędami dźwigu i kontroluje pozycję haka z wykorzystaniem tzw. manetki lub joysticka. Celem jest ułatwienie tego zadania poprzez stworzenie rozwiązań, które będą bardziej intuicyjne niż sterowanie dźwigiem z kabiny ciężarówki.
– Politechnika Poznańska robi układy „haptic”, czyli joysticki aktywne, które przenoszą wrażenia siłowe, takie jak obciążenie, z dźwigu na joystick. Politechnika Koszalińska pracuje nad sterowaniem głosowym, które umożliwi rozmawianie z urządzeniem w mowie potocznej. System ten jest już bardzo zaawansowany. Rozważana jest możliwość opatentowania rozwiązania – mówi prof. Mirosław Pajor.
Najwięcej dzieje się na ZUT. Tu pracuje około 20-osobowy zespół naukowców (80 proc. to doktoranci działający w ramach Centrum Mechatroniki). Udoskonalono już wcześniejsze rozwiązanie z goglami 3D. Na obraz w goglach będą nałożone dodatkowe informacje, np. oznaczenie miejsca, gdzie element podnoszony przez dźwig powinien być położony.
Drugie zadanie zespołu Centrum Mechatroniki, to sprawienie, by dźwig poruszał się jak robot. – Problem jest w tym, że dźwig mocno się ugina i dokładne określenie, gdzie jest jego końcówka z hakiem jest trudne. Kamery wizyjne umieszczone na kabinie ciężarówki posłużą do śledzenia pracy dźwigu i kontrolowania jego pozycji. Na tej podstawie dźwig sam wyliczy trajektorię ruchu, czyli jak ma poruszać poszczególnymi napędami – wyjaśnia prof. Mirosław Pajor.
Kamery posłużą także do monitorowania gestów operatora. Powstanie moduł, który będzie rozpoznawał gesty. Założenie jest takie, że operator poruszając ręką pokazuje jak dźwig ma się poruszać. Ten moduł ma uzupełniać system komunikacji głosowej opracowywany w Politechnice Koszalińskiej.
– W projektowaniu układu, który śledzi operatora, dodatkowo wykorzystujemy mikrosensory ruchu komunikujące się z modułem zainstalowanym na dźwigu. Sensory przekażą informację o pozycji operatora i jego gestach, a moduł analizy tych danych wywoła realizację odpowiednich komend przez dźwig. Wyobraźmy sobie chociażby sytuację, kiedy operator stojący na zewnątrz kiwnie ręką, a dźwig automatycznie podjedzie do niego – opowiada prof. Mirosław Pajor.
Powstaje także koncepcja ręcznego sterowania dźwigiem, którego ruch będzie automatycznie kierowany specjalnym joystickiem zamontowanym na końcu wysięgnika dźwigu. Teraz operator, by precyzyjnie naprowadzić hak i zaczepić go do ładunku, posługuje się joystickiem wewnątrz kabiny ciężarówki.
Kolejne rozwiązanie, to skaner ruchu ramion operatora. Jest to interaktywny układ mechaniczny, który nakłada na siebie operator po to, by poruszając ramieniem sterować ruchem dźwigu. – Rozwiązanie działa także w drugą stronę – przenosi wrażenia siłowe z dźwigu na operatora. Przykładowo poczuje on, że ładunek jest za ciężki lub dźwig zbliża się strefy do maksymalnego, dopuszczalnego wysięgu – zauważa prof. Mirosław Pajor. Zaraz dodaje: – Chcemy także umożliwić wyczuwanie kontaktu z przeszkodą. Operator wyposażony w skaner ruchu ramion będzie mógł odczuwać wrażenie dotyku z przeszkodą. Tutaj mamy do czynienia z jednym z głównych problemów w automatyce, związanym z transmisją sygnału, bo wszelkie opóźnienia sygnału powodują, że źle odbieramy wrażenia.
Skaner ruchu ramion w przyszłości może znaleźć zastosowanie w innych robotach przemysłowych, w dziedzinie rehabilitacji, czy poruszania się w przestrzeni wirtualnej.
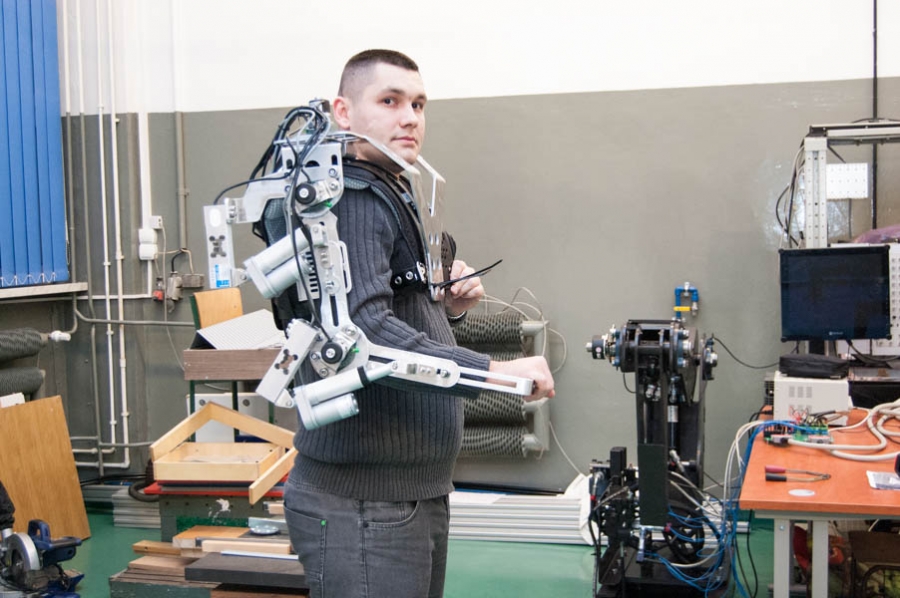
Skaner ruchu ramion operatora to jedno z rozwiązań, które w przyszłości mogą być wykorzystywane przez operatorów dźwigów leśnych marki Hiab (część koncernu Cargotec) /fot.: ak/
Całość projektu ma zakończyć się do końca 2017 roku. W połowie roku naukowcy z ZUT będą uruchamiać poszczególne podsystemy. W tej chwili funkcjonują one oddzielenie, nie są połączone z dźwigiem.
– Potem będzie można pomyśleć którą technologię z którą zintegrować i stworzyć kompletny system do wdrożenia w warunkach przemysłowych. To może będzie tematem następnych projektów. Jeśli Cargotec będzie zainteresowany kontynuacją prac, to będziemy starali się o projekt wdrożeniowy z NCBiR – mówi prof. Mirosław Pajor. Możliwe jest także, że Cargotec sam sfinansuje wdrożenie do produkcji najlepszego układu sterowania.
ak
Wszystkich rekordów:








